The paradigms of places, or spatial relationship, are an example of auxiliary paradigms, that can be used to create, for instance, complements of places in verbal sentences. The description of spatial relationships can use neither the direct meaning of primitives nor the meaning of lower-case letters. In this case as in several similar cases, the design of paradigms is based on the use of symmetries, including the dyad virtual/actual and the triad sign/being/thing. The morphemes of this paradigm begin by the substance E: because they belong to the auxiliary class and they end by the mode l. because they are related to space. The variables are concentrated in the attribute (specially its substance and attribute).
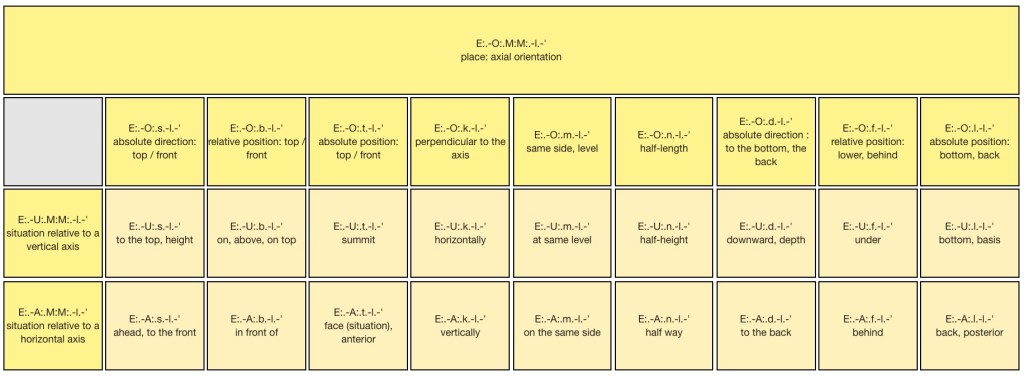
Place: Axial Orientation
In Figure 1 the two rows oppose a vertical and a horizontal axis according to the dyad U/A. The three first columns are related to top (for the vertical axis) and front (for the horizontal axis), the three middle columns indicate the middle, the three last columns include the bottom and the back. Each group of three columns is divided into a column for an absolute direction, a column for a relative position and a column for an absolute position.
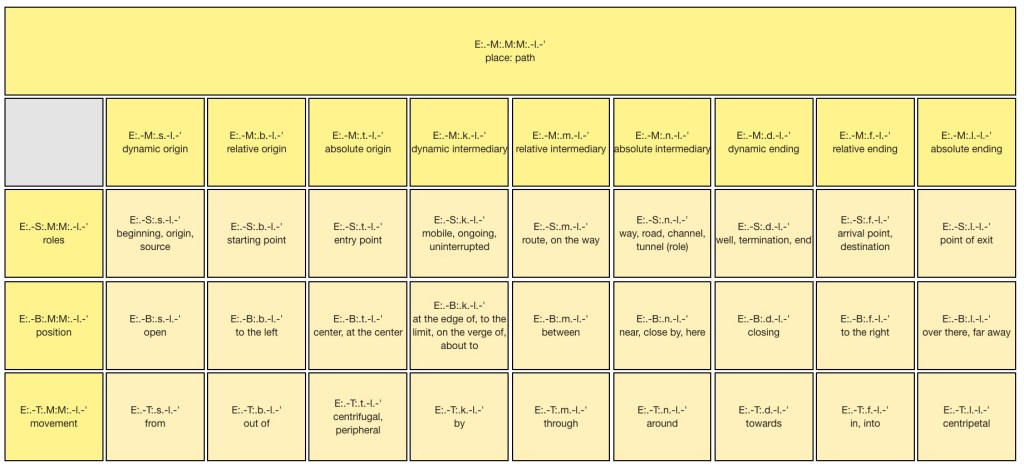
Place: Path Orientation
In Figure 2, instead of a variation on axial orientation, we have a variation on the beginning, the middle and the end of a path. The first row (S:) displays path roles, the second (B:) static positions and the third (T:) movements or dynamic tropisms.
E:.-O:.M:M:.-l.-‘ (place: axial orientation) and E:.-M:.M:M:.-l.-‘ (place: tracking) are part of the same root-paradigm E:.-F:.M:M:.-l.-‘ that describes all kinds of spatial relationships.
